A resolução de um encoder é o número de pulsos por revolução (PPR) gerado pelo encoder incremental ou número de bits de saída no caso de um encoder absoluto após uma rotação de 360º de seu eixo.
Errar na hora de escolher a resoluçãode um encoder é fatal, pois o sensor não irá fornecer informações suficientes para que um controlador atue de forma correta em um processo.
Para os absolutos, o cálculo da resolução depende diretamente da velocidade de atualização Baud do protocolo do encoder e o tempo com que o sistema solicita informações de posição.
Para os incrementais, o cálculo da resolução irá depender do RPM do processo e a frequência de operação do encoder.
Calculo da Resolução de um Encoder Absoluto (bits)
Ao contrário dos encoders Incrementais com suas saídas de ondas quadradas contínuas, os encoders absolutos fazem medições discretas da posição, e fornecem a informação sempre que são interrogados por um controlador, nesse ponto é possível observar que esses encoders, não são limitados pela frequência, mas pela quantidade de informações necessárias que são requisitadas durante um período de amostra específico.
Para determinar o número de posições discretas necessárias (N), primeiro determine o menor incremento de medição (Y) necessário dentro da rotação de 360 graus:
N=360/Y
Por exemplo, se você precisar medir até 0,01 graus, o cálculo resultante seria N = 360 / (0,01) = 36.000 posições discretas.
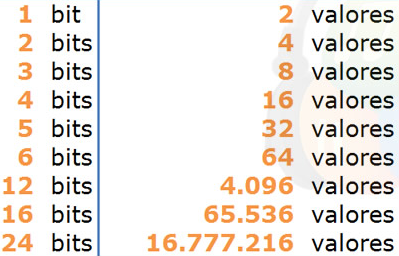
Em seguida, converta o número de posições discretas necessárias para a próxima contagem de bits mais alta. Um codificador de 16 bits, por exemplo, pode medir 65.536 posições discretas por uma rotação de 360 °, o que satisfaria o exemplo acima. Outro ponto observado acima seria justamente a quantidade de posições possíveis a serem medidas, dada por 2 N.
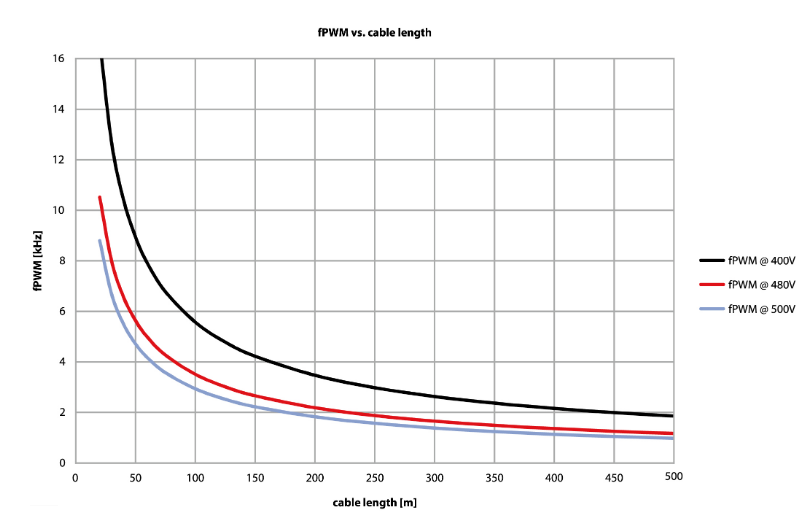
Porém outro fator influencia diretamente os encoders absolutos, sendo estes, seus protocolos de comunicação, com taxas de transmissão específicas para cada um deles. Generalizando um pouco, a medida que o comprimento do cabo de um encoder aumentar as taxas de transmissão diminuem.
Na tabela abaixo, para a interface de comunicação SSI, é possível observar o fato comentado acima, sendo outro ponto a ser levado em consideração na hora de adquirir seu encoder absoluto.
Determinando a Resolução Requerida Mínima
Em primeiro lugar, a seleção de uma resolução começa com o menor grau (X) que precisa ser monitorado na aplicação. Por exemplo, para uma aplicação que precisa ter uma precisão de 3º o número de pulsos (N) que queremos ter por revolução é dado pela fórmula N=360/X,
Caso X= 36, N=360/36 logo N=10, sendo 10 PPR a resolução mínima.
N=360/X
Calculo da Resolução de um Encoder Incremental (PPR)
Para encoders Incrementais com suas saídas eletrônicas, existe um certa frequência de resposta na saída desses Sensores, o que limita a quão rápido pulsos serão gerados na saída.
Combinar a informação acima com o RPM suportado pelo encoder, estabelece um limite máximo na qual um sistema com aquele sensor específico pode alcançar:
Resolução Máxima do Encoder = Frequência de Operação x 60/ RPM Máximo
Ultrapassar esse número irá sobrecarregar a capacidade do processamento do sensor, a saída terá seu sinal degradado e acarretará erros acumulativos.
Por exemplo, se a frequência de operação do encoder for 30kHz e a velocidade máxima do eixo for 6.000 RPM. O cálculo do ppr do codificador para a resolução máxima suportada pelo codificador será de 300 pulsos por rotação (PPR).
Para um material mais detalhado, consulte diretamente o site da Dynapar.
Caso tenha alguma dúvida na escolha do encoder mais apropriado para a sua aplicação. Entre em contato, a equipe da Mokka-Sensors estará a sua disposição!