A velocidade de um Resolver é o número de ciclos elétricos gerados pelos enrolamentos de saída comparado com número de revoluções mecânicas. De forma compacta para um resolver de velocidade única apenas um ciclo é gerado por revolução mecânica. Para Resolvers de múltipla velocidade são gerados mais de um ciclo elétrico por revolução
De forma geral a velocidade em que um resolver irá operar é determinada pela aplicação no qual ele está instalado, bem como o grau de controle que a mesma exige. Resolvers de velocidade múltipla têm a função de gerar diversos ciclos de ondas seno e cosseno por revolução aumentando consideravelmente a precisão do sinal de saída, sendo assim muito requisitados para projetos em que o menor erro pode custar caro.
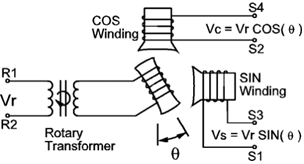
Resolvers – Enrolamentos
Constituídos por um enrolamento primário, o qual irá receber a tensão de alimentação de uma fonte externa, e um par de enrolamentos secundários separados por 90º entre si, os quais serão responsáveis por gerar os sinais de saída seno e cosseno. Sendo também chamadas de enrolamentos seno e cosseno.
Na sequência, a partir da rotação do eixo interno do resolver, um campo magnético irá surgir entre esses enrolamentos. Surgindo uma tensão de saída nos enrolamentos secundários. Por consequência essa tensão pode ser utilizada para calcular o ângulo, posição, velocidade e etc.
Resolvers de Velocidade Única
Seu nome reflete diretamente em sua função, a partir dos enrolamentos de saída um onda completa seno e uma onda completa cosseno é gerada para cada 360º que o eixo rotaciona. Dessa forma Resolvers de Velocidade Única apresentam posições absolutas e em casos específicos podem tranquilamente substituir encoders absolutos.
Resolvers de Múltipla Velocidade
Para cada rotação de 360º do eixo um Resolver de múltiplas velocidades apresentam diversos ciclos de ondas seno e cosseno. Sua construção foi pensada visando monitorar o funcionamento de um motor a partir de sua caixa de engrenagens que desempenhavam várias voltas. Para um Resolver de três velocidades, a cada 360º dado pelo eixo, 3 ondas seno e 3 ondas cosseno são fornecidas na saída. A maior proporção de ciclos elétricos em relação à rotação mecânica ajuda a minimizar os efeitos de fontes de erros mecânicos no sistema.
Sua eficácia na eliminação de interferências mecânicas é notável, entretanto um custo maior é adicionado à essa equação .
Principais Aplicações para o Resolver:
Feedback de Posição:
Para aplicações de medição de posição os Resolvers precisam ser de velocidade única. Como resultado, qualquer posição mecânica em 360 ° de rotação corresponde a apenas um valor único para o seno e o cosseno. Isso faz do design de Resolver equivalente a um encoder absoluto.
Feedback de Velocidade:
Sejam de uma única Velocidade ou de múltiplas velocidades, ambos se encaixam para esse tipo de medição. A diferença como já foi abordada anteriormente fica por conta exclusivamente da precisão. Onde Resolvers de Múltiplas Velocidades se destacam.
Comutação de Motores:
Um Resolver, por conseguir operar em ambientes agressivos com facilidade, podem desempenhar um papel satisfatório na comutação de motores, entretanto o aviso deste tópico fica por conta da função de um Resolver, que é apenas capaz de relatar na saída um ou mais ciclos de ondas seno e cosseno. Nesse caso, se um processo no qual um Resolver for implementado existir erros e interferências, o resolver irá funcionar sob essas condições, sem a capacidade de corrigi-los.
Conheça os Resolvers Mais Populares da Dynapar

Para um material mais detalhado, consulte diretamente o site da Dynapar.
Caso tenha alguma dúvida na escolha do Resolver mais apropriado para a sua aplicação. Entre em contato, a equipe da Mokka-Sensors estará a sua disposição!