
Encoder AGBR0360HYBA2N– Aplicação Agrícola
Encoder AGBR0360HYBA2N– Aplicação Agrícola Jumil
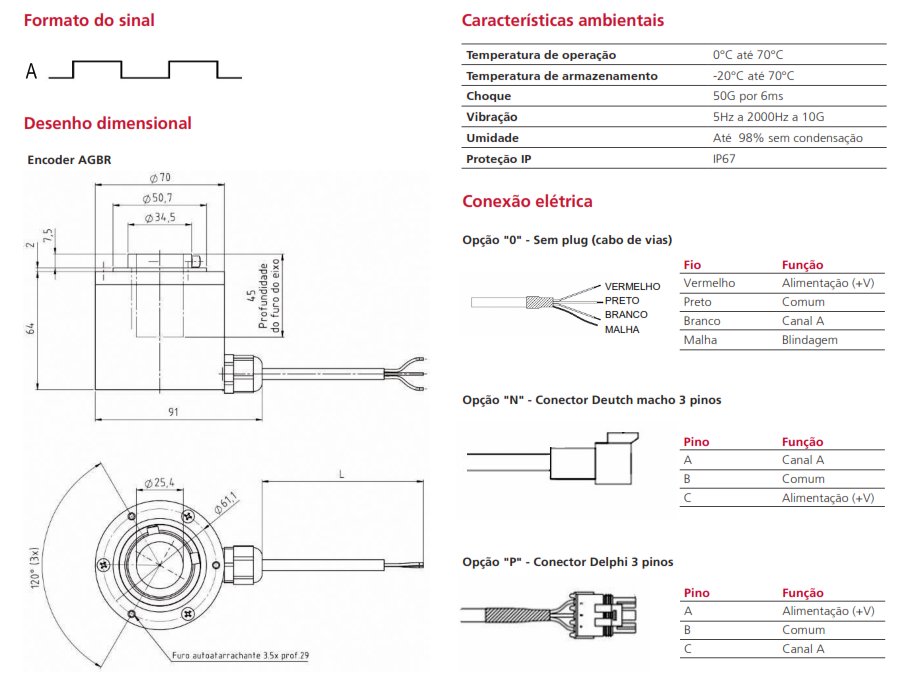
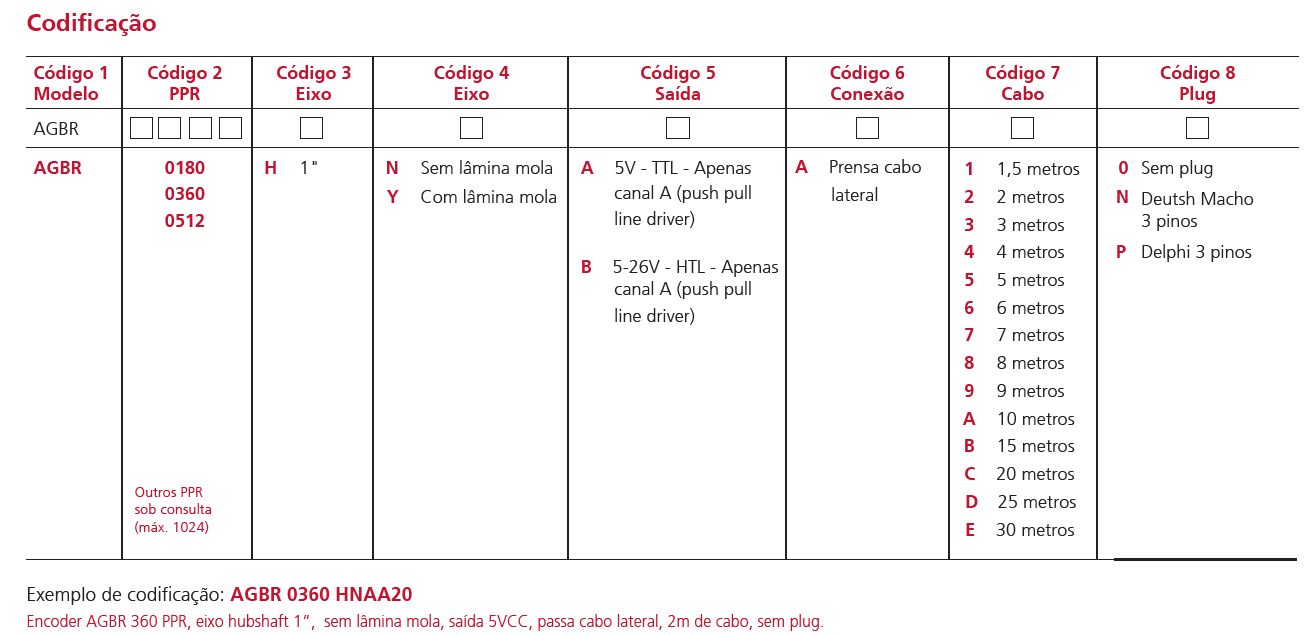
Descrição: Encoder incremental bidirecional com marker, construção em plástico com resina especifica para ambiente agressivo com NPK, próprio para agricultura com 360PPR, eixo hubshaft de 1″, montagem com lâmina mola, saída de saída 5V-26V HTL apenas canal A (push pull line drive) prensa cabo lateral com cabo de 2 metros e conector Deutsch Macho 3 pinos Jumil.
Sua construção é robusta, com invólucro em plástico resistente, eletrônica selada por resina, eixos e parafusos em aço inox e conectores automotivos.
Essas caracterísitcas aliadas à tecnologia de sensoriamento magnético, tornam o AGBR totalmente resistente a ação de contaminantes químicos comuns no campo, como fertilizantes (inclusive NPK), óleos ou poeiras.
– Sensor com tecnologia magnética
– Resoluções de 180, 360 ou 512 PPR
– Resistente à corrosão por agentes químicos (inclusive NPK)
– 70mm de diâmetro externo
– Temperatura de operação de 0º C a 70º C
Dados Mecânicos Encoder AGBR0360HYBA2N
Velocidade máxima: 500 RPM
Torque Inicial: 1,0 N.cm
Runout (eixo de montagem): +/- 0,13 mm (máximo)
Endplay (eixo demontagem): +/- 0,6 mm
Diâmetro do eixo: 1 polegada, Hubshaft (semi-vazado)
Fixação do eixo: 2 parafusos sem cabeça (inox)
Dados Elétricos Encoder AGBR0360HYBA2N
Alimentação 5 a 26 VCC
Saídas HTL (5-26 VCC) ou TTL (5 VCC) máximo 40mA
Consumo < 100mA
Frequência máxima: 300 kHz (sensor)
Resolução: 360 PPR
Proteção elétrica: Inversão de polaridade, curto-circuito entre saídas e sobretensão
Simetria: 180° ± 90°
Codificação Encoder AGBR0360HYBA2N
Perguntas Frequentes
O que é um encoder?
Um encoder é um transdutor que converte um movimento mecânico angular ou linear em uma série de pulsos analógicos ou digitais elétricos. Esses pulsos gerados podem ser usados para determinar velocidade, taxa de aceleração, distância, rotação, posição ou direção.
Quais são os tipos de encoders?
Existem dois tipos de encoders: Encoders Incrementais e Encoders Absolutos.
Consulte também:
– Quais são as características de um Encoder Incremental?
– E quais são as características de um Encoder Absoluto?
Quais são as características de um Encoder Incremental?
Um Encoder Incremental gera uma quantidade pré-determinada de pulsos, para cada unidade de deslocamento. Este tipo de encoder pode ter dois canais (A e B), ou mais com uma defasagem de 90° entre eles, e estes podem servir para indicar a direção do encoder, sendo que quando o canal A chega primeiro, e o B depois, indica uma direção, e quando o B chega primeiro, e o A depois, isso indica direção inversa.
Este modelo pode ainda contar com um sinal de Marker (index), que emite um pulso positivo a cade 360°. Esse sinal pode servir como orientação do posicionamento. Por exemplo, gira-se o eixo do encoder, até a subida do canal de Marker, e para um encoder de 1024 pulsos, ele deverá gerar 1024 sinais, antes da subida do segundo pulso do Marker.
Os encoders incrementais podem ter a saída tanto em quadratura (ondas quadradas) como saída senoidal (com ondas senoidais), as quais o cliente deverá escolher de acordo com sua aplicação.
Quais são as características de um Encoder Absoluto?
Encoders Absolutos
são encoders que geram um código binário para cada unidade de deslocamento. Esses encoders mostram esse código binário, no momento em que são ligados, e mantem a posição, mesmo que ocorra uma queda na alimentação.
São muito utilizados quando se necessita precisão no posicionamento. Estão divididos em dois tipos:
– Giro simples (single turn): gera uma sequencia de sinais por giro;
– Giro múltiplo (multi turn): gera múltiplas sequencias de sinais durante um giro.
Como especificar um encoder para minha aplicação?
Para especificar um encoder devemos saber se ele será incremental ou absoluto, quantos PPR (Pulsos Por Rotação) ele terá, se o eixo será sólido, vazado, expandido ou passante, qual é o diâmetro e o comprimento desse eixo, qual é a tensão de alimentação e qual o tipo de cabo ou conector.