
ÁREAS DE ATUAÇÃO – Encoder B58N – Incremental
Encoder B58N – Alta Resolução, Principais Aplicações: Óleo e Gás – Agricultura – Automação de Fábricas – Elevadores – Embalagem – Laboratórios – Motores Elétricos – Papel e Celulose – Robótica – Servomotores – Siderurgia e Mineração
DESCRIÇÃO
Versão de alta resolução (4096PPR e 5000PPR) do encoder B58N, que é produzido no Brasil e é um equipamento robusto, compacto e muito flexível.
Principal encoder incremental do mercado, o Encoder B58N é fabricado no Brasil e oferece alta robustez em um projeto compacto e muito flexível. Reunindo várias opções de construção mecânica, é oferecido nas versões eixo sólido, eixo vazado, eixo passante ou eixo expansivo, além de contar com uma variedade de flanges e suportes de fixação.
Possui resolução de 1 a 3600 PPR. É protegido contra sobretensão, inversão de polaridade e curto-circuito entre saídas. A temperatura de operação é de 0°-100°C e a de armazenamento de -20°C a 100°C. É um encoder leve, com aproximadamente 400 gramas. Tem garantia de 1 ano para defeitos de fabricação e opção de Produção Turbo, com prazo de 2 dias úteis.
Principais Part Numbers: B58N3600KAAL20, B58N2500ZABB20, B58N2500S6BB5K, B58N2500S6BB1K, B58N2048K6BL00, B58N2048ICBATI, B58N2048DFBM00, B58N2048DCBCA0, B58N2048DCBC50, B58N2048DCBA60, B58N2048DCAAA0, B58N2000K6BL00, B58N2000DCBA60, B58N1024WFFD00, B58N1024SCBA50, B58N1024SABC00, B58N1024S6AAST, B58N1024HCBC70, B58N1024HCBA10, B58N1024DFBL00, B58N1024DFBC00, B58N1024DCBC00, B58N1024DCBAA0, B58N1024DCBA90, B58N1024DCBA20, B58N1024AABAG0, B58N1000SCBA20, B58N1000AABS00, B58N1000AABL00, B58N0500ZABA50, B58N0360SABC00, B58N0360KABC00, B58N0360KABA20, B58N0100SABB20, B58N0100SABA40, B58N0040ZABL00.
Clique Aqui para mais informações sobre Encoders Dynapar.

Perguntas Frequentes
O que é um encoder?
Um encoder é um transdutor que converte um movimento mecânico angular ou linear em uma série de pulsos analógicos ou digitais elétricos. Esses pulsos gerados podem ser usados para determinar velocidade, taxa de aceleração, distância, rotação, posição ou direção.
Quais são os tipos de encoders?
Existem dois tipos de encoders: Encoders Incrementais e Encoders Absolutos.
Consulte também:
– Quais são as características de um Encoder Incremental?
– Quais são as características de um Encoder Absoluto?
Quais são as características de um Encoder Incremental?
Um Encoder Incremental gera uma quantidade pré-determinada de pulsos, para cada unidade de deslocamento. Este tipo de encoder pode ter dois canais (A e B), ou mais com uma defasagem de 90° entre eles, e estes podem servir para indicar a direção do encoder, sendo que quando o canal A chega primeiro, e o B depois, indica uma direção, e quando o B chega primeiro, e o A depois, isso indica direção inversa.
Este tipo de encoder pode ainda contar com um sinal de Marker (index), que emite um pulso positivo a cade 360°. Este sinal pode servir como orientação do posicionamento. Por exemplo, gira-se o eixo do encoder, até a subida do canal de Marker, e para um encoder de 1024 pulsos, ele deverá gerar 1024 sinais, antes da subida do segundo pulso do Marker.
Os encoders incrementais podem ter a saída tanto em quadratura (ondas quadradas) como saída senoidal (com ondas senoidais), as quais o cliente deverá escolher de acordo com sua aplicação.
Quais são as características de um Encoder Absoluto?
Encoders Absolutos são encoders que geram um código binário para cada unidade de deslocamento. Esses encoders mostram esse código binário, no momento em que são ligados, e mantem a posição, mesmo que ocorra uma queda na alimentação.
São muito utilizados quando se necessita precisão no posicionamento. Estão divididos em dois tipos:
– Giro simples (single turn): gera uma sequencia de sinais por giro;
– Giro múltiplo (multi turn): gera múltiplas sequencias de sinais durante um giro.
Como especificar um encoder para minha aplicação?
Para especificar um encoder devemos saber se ele será incremental ou absoluto, quantos PPR (Pulsos Por Rotação) ele terá, se o eixo será sólido, vazado, expandido ou passante, qual é o diâmetro e o comprimento desse eixo, qual é a tensão de alimentação e qual o tipo de cabo ou conector.
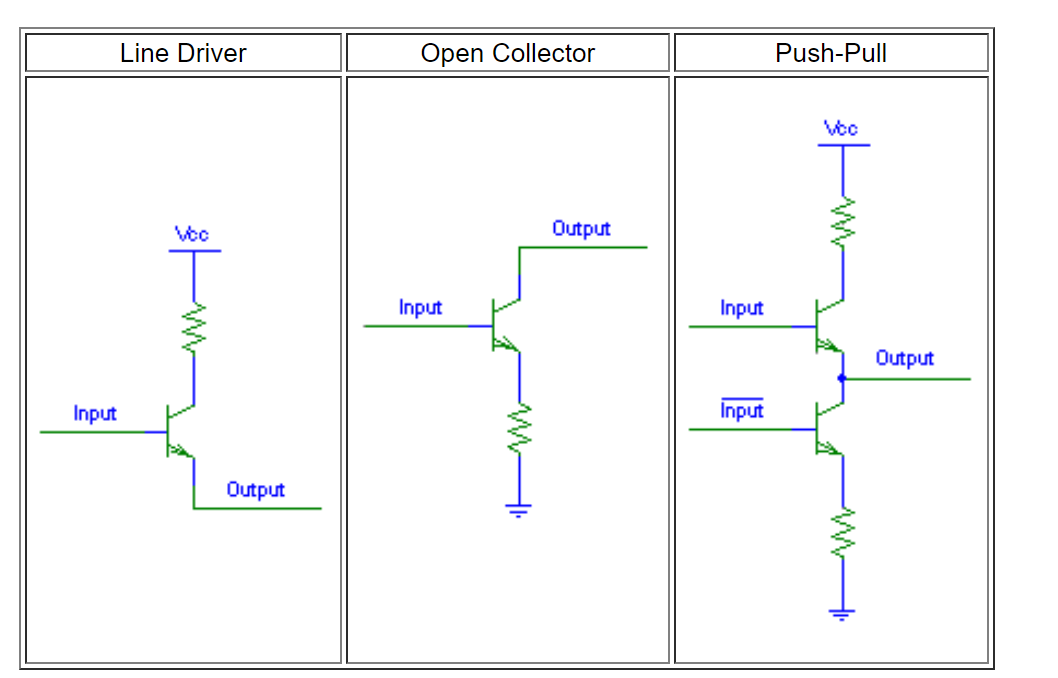
Qual é a diferença entre os Encoders de Quadratura Driver de Linha, Coletor Aberto e Push-Pull?
Driver de Linha
Um driver de linha é uma fonte de saída. Quando está no estado ligado, o driver de linha fornece Vcc. No estado desligado, um driver de linha irá flutuar. Por causa disso, uma entrada de redução é necessária para que a operação ocorra corretamente. Por favor observe a tabela abaixo para ver um exemplo simples de um driver de linha.
Coletor Aberto
Um coletor aberto é uma saída reduzida. No estado desligado, o coletor aberto fornecerá uma direção ao terra. Quando estiver no estado ligado, o coletor aberto irá flutuar. Para operar corretamente, uma fonte de entrada é necessária. Por favor observe a tabela abaixo para ver um exemplo simples de um coletor aberto.
Push-Pull
Uma saída push-pull é a combinação de um driver de linha e um coletor aberto. No estado desligado ela fornecerá uma direção ao terra e no estado ligado ela fornecerá Vcc. Por favor observe a tabela abaixo para ver um exemplo simples de uma saída push-pull.
Quais são os efeitos de temperaturas elevadas no Encoder?
Nos encoders opticos , o disco passa entre um LED e um fotodetector, modulando o facho de luz para se obter um fluxo de pulsos que vai nos dar velocidade, direção e posição. Os discos podem ser feitos de vidro, poliester ou metal. Encoders magnéticos operam com principio similar, porem os discos usam padrões magnéticos. Em ambos os casos, temperaturas extremas podem impactar o desempenho, propriedades mecânicas e vida útil.
A expansão térmica em altas temperaturas é um problema. A folga entre o disco e o detector pode ser de até 0,5mm. Dependendo da temperatura, tamanho da folga, coeficiente de expansão térmica dos materiais, a expansão pode levar ao contato entre as duas peças, levando ao desgaste e falha.
Temperaturas elevadas podem também deteriorar o lubrificante e danificar as vedações dos rolamentos, levando a falha prematura.
Saiba detalhes dos encoders magnéticos.
Encoder é um dispositivo eletromecânico. Reproduz pulsos elétricos a partir do movimento rotacional. Também é definido como um transdutor de posição angular.
O encoder funciona como um sensor e com base em dados sobre a velocidade e posição do equipamento. Geralmente, a peça utiliza movimento circulares ou lineares. A leitura do encoder é fundamentada em um disco com janelas radiais, transparentes e opacas.
Os Encoders Heavy-Duty Dynapar, com tecnologia magnética e projetados para fornecer um sinal digital confiável nos mais exigentes e severos ambientes de aplicação.
Confira algumas vantagens de utilizar um encoder magnético:
- Resistente a temperaturas altas;
- Suporta choques e vibrações;
- Vedação robusta e consistente;
- Protegido contra contaminantes.
Entenda a diferença entre encoders absolutos/incrementais single-turn e multi-turn e onde utilizar cada um deles. Aprenda mais aqui, no Centro de Conhecimento Dynapar.
Conheça mais sobre as tecnologias
Os encoders single-turn (volta-única) medem o deslocamento do eixo em 360° a partir de uma posição inicial definida com uma saída repetida para cada rotação do eixo do encoder. Já os encoders multi-turn (multi-voltas), além da medição do grau de rotação dentro de 360°. Também registram o número de rotações totais do eixo do encoder, utilizando um valor digital único (ou “word”) para cada posição e número de rotações.
Um encoder single-turn é análogo a um relógio com ponteiro apenas para minutos (figura à esquerda). Após 60 minutos, o relógio é reiniciado e não registra o número total de rotações, ou neste caso, horas. Um encoder multi-turn é como um relógio tradicional, com um ponteiro para minuto e outro para horas (figura à direita). Em qualquer momento, tanto a posição do ponteiro quanto o número total de rotações do ponteiro dos minutos (horas) podem ser lidas.
Aplicações para encoder single-turn
Os encoders single-turn são ideais para aplicações que medem menos de 360° de rotação. Como a medição do ponto de articulação de um ângulo ou medição de rotações parciais de um eixo. Por exemplo, um encoder single-turn pode ser usado para medir o ponto de articulação de uma porta. Ou para determinar o ângulo de sua abertura. Um encoder single-turn também pode ser usado para medir o ponto de pivô de uma antena rotativa para determinar seu ângulo.
Os encoders absolutos single-turn também são comumente usados em servo motores de ímã permanente. Para fornecer a posição do estator do motor em relação ao rotor após a inicialização para um controle de torque melhorado. Apesar de um motor fazer várias rotações, muitas aplicações não requerem registrar o número total de voltas, apenas a posição dentro de uma rotação.
Aplicações para encoder multi-turn
Os encoders multi-turn são ideais para aplicações que medem o grau de rotação e o número total de rotações. Eles também são ideais para medir longos períodos de movimento linear onde não é possível. Ou econômico usar um encoder linear ou quando o ponto de rotação não é acessível. Por exemplo: registar o movimento ao longo da circunferência de uma grande antena parabólica. Medir a rotação de um anel deslizante ou a medição de um sistema de registro de profundidade bem detalhado.
Os encoders multi-turn também são ideais para o feedback do servo-motor quando a aplicação envolve eixos coordenados que são deslocados. Com um encoder single-turn, os deslocamentos serão perdidos quando o sistema perder a energia e o sistema precisaria ser mantido. Apesar de um backup de bateria ajudar a evitar isso, o sistema ainda perderia posição se ele se mover mecanicamente enquanto a energia estiver desligada (por exemplo, se um operador mover manualmente o dispositivo). Com um encoder multi-turn, a posição de deslocamento pode ser programada na lógica da máquina.
Por exemplo, se um sistema de fabricação de semicondutores perde energia ao processar um wafer grande, reajustar o dispositivo e retornar à sua posição anterior dentro da escala manométrica. É quase impossível e pode resultar em que o wafer inteiro seja perdido. Por isso aplicações como esta usam encoders multi-turns que permitem que as posições sejam salvas mecanicamente no encoder no caso de uma falha de energia.
Encoders incrementais multi-turn

Encoders incrementais normalmente incluem um canal especial no seu disco de códigos conhecido como canal de índice, index, marker ou canal Z. Este é um canal no disco que é separado e tem uma única região opaca. Cada vez que o disco de códigos completa uma rotação total, o canal Z gera um único pulso. O dispositivo de leitura pode usar esse pulso para contar o número de rotações completas. Que a carga faz e usa contagem para cima/para baixo para rastrear as rotações parciais.
O número de rotações completas que o dispositivo que recebe sinal de um encoder incremental multi-turn pode monitorar é limitado apenas pelo processamento e capacidade de armazenamento do dispositivo de leitura que normalmente é um microprocessador. A principal desvantagem de um encoder incremental multi-turn é que ele perde todas as informações em um desligamento de energia. Para superar esta limitação, um backup de bateria pode ser usado para permitir que os dados sejam salvos. No entanto, se o sistema se mover mecanicamente após a perda de energia, o sistema precisará ser mantido, a menos que o backup da bateria e um contador estejam presentes no lado do encoder.
Encoders absolutos multi-turn com engrenagens

A versão mais simples de um encoder absoluto multi-turn envolve dois discos:
– Disco para monitoramento ±360 °
– Disco secundário para monitorar rotações completas do disco de código primário.
Os dois estão conectados por um sistema de engrenagem complexo que indexa o disco secundário para cada rotação total do disco primário.
Isso pode levar a um sistema capaz de rastrear uma quantidade significativa de movimento. Por exemplo, emparelhar um disco primário de 10 bits e um disco secundário de 10 bits produz um sistema capaz de 1024 posições rotativas e 1024 voltas completas.
Em teoria, esses projetos podem ser expandidos para um alto número de discos secundários, dependendo dos requisitos da aplicação.

Encoders absolutos multi-turn com sensores (Wiegand)
Um sensor Wiegand pode ser usado para criar um encoder multi-turn sem engrenagens. Ele gravará as rotações induzindo a mudança em um campo magnético. Isso faz com que um fio gere um pulso uma vez por rotação do encoder.
O pulso habilita um contador dentro do encoder que então grava a rotação. Com menos componentes mecânicos, os encoders multi-turns absolutos com sensor Wiegand geralmente são mais compactos do que outros encoders multi-turns. Menos fricção é gerada dentro do encoder graças a menos componentes mecânicos.
Um encoder multi-turn é mais preciso do que um encoder single-turn?
Um encoder multi-turn tecnicamente aumenta a resolução do dispositivo. No entanto, a precisão ainda é ditada pela contagem de bits single-turn. Em muitas aplicações, o encoder não irá limitar a precisão do sistema. Isso acontece porque a precisão do dispositivo single-turn excede a precisão mecânica do resto do sistema.
Quais são os Principais Part Number do Encoder B58N?
| Encoder B58N3600KAAL20 |
| Encoder B58N2500ZABB20 |
| Encoder B58N2500S6BB5K |
| Encoder B58N2500S6BB1K |
| Encoder B58N2048K6BL00 |
| Encoder B58N2048ICBATI |
| Encoder 58N2048DFBM00 |
| Encoder B58N2048DCBCA0 |
| Encoder B58N2048DCBC50 |
| Encoder B58N2048DCBA60 |
| Encoder 58N2048DCAAA0 |
| Encoder B58N2000K6BL00 |
| Encoder B58N2000DCBA60 |
| Encoder 58N1024WFFD00 |
| Encoder B58N1024SCBA50 |
| Encoder B58N1024SABC00 |
| Encoder B58N1024S6AAST |
| Encoder B58N1024HCBC70 |
| Encoder B58N1024HCBA10 |
| Encoder B58N1024DFBL00 |
| Encoder B58N1024DFBC00 |
| Encoder B58N1024DCBC00 |
| Encoder B58N1024DCBAA0 |
| Encoder B58N1024DCBA90 |
| Encoder B58N1024DCBA20 |
| Encoder 58N1024AABAG0 |
| Encoder B58N1000SCBA20 |
| Encoder B58N1000AABS00 |
| Encoder B58N1000AABL00 |
| Encoder B58N0500ZABA50 |
| Encoder B58N0360SABC00 |
| Encoder B58N0360KABC00 |
| Encoder B58N0360KABA20 |
| Encoder B58N0100SABB20 |
| Encoder 58N0100SABA40 |
| Encoder B58N0040ZABL00 |